Robotikiyat Hybrid
Autonomous & IoT remote-controlled system for Industry 4.0
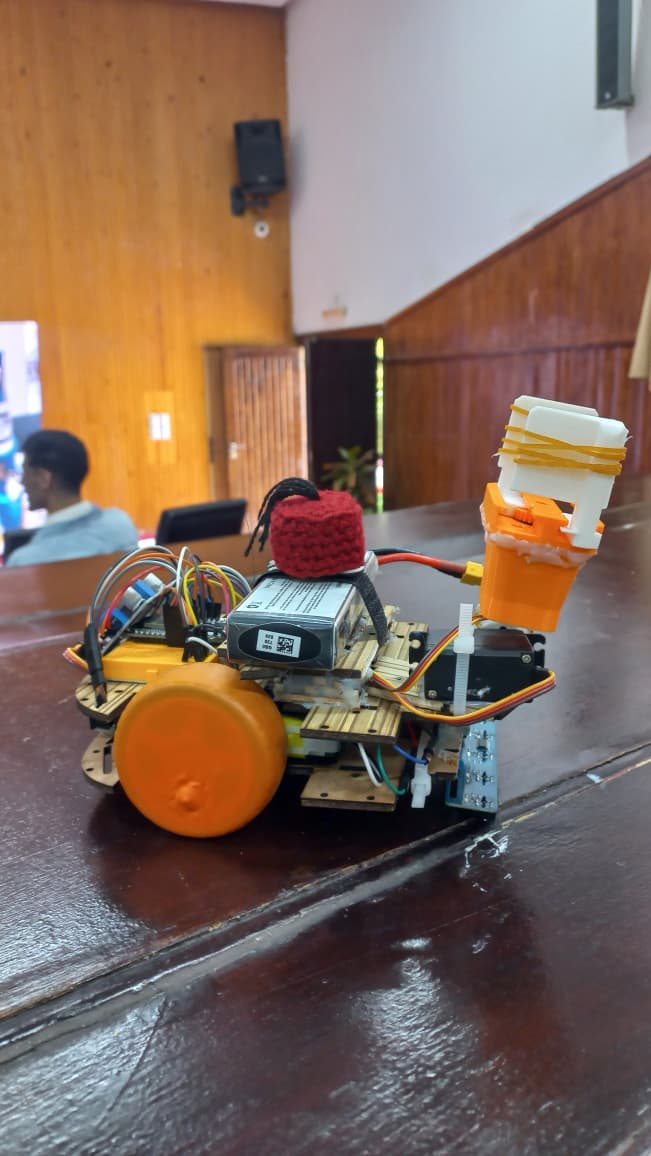
The Hybrid Robot
Detailed view of the system

Award Ceremony
2nd Place at MRNC 2026
Project Overview
The Robotikiyat Hybrid is an award-winning robotic system that secured 2nd place at the MRNC 2026 "Smart Factory" competition (organized by the Mechatronics Club at ENSET Mohammedia).
It stands out by seamlessly blending "Zero-Fault" autonomous navigation, Bluetooth-controlled material handling, and real-time IoT synchronization with factory infrastructure.
Software Architecture & IoT
What truly sets this robot apart is its software architecture. Upon power-up, it uses Wi-Fi to perform an automatic security handshake on Port 5000 with the central server (IP: 34.175.59.17).
Once authenticated, it can algorithmically trigger HTTP GET requests to physically control external factory elements (turntable, security gates, storage elevator) exactly when it encounters them on the production line.
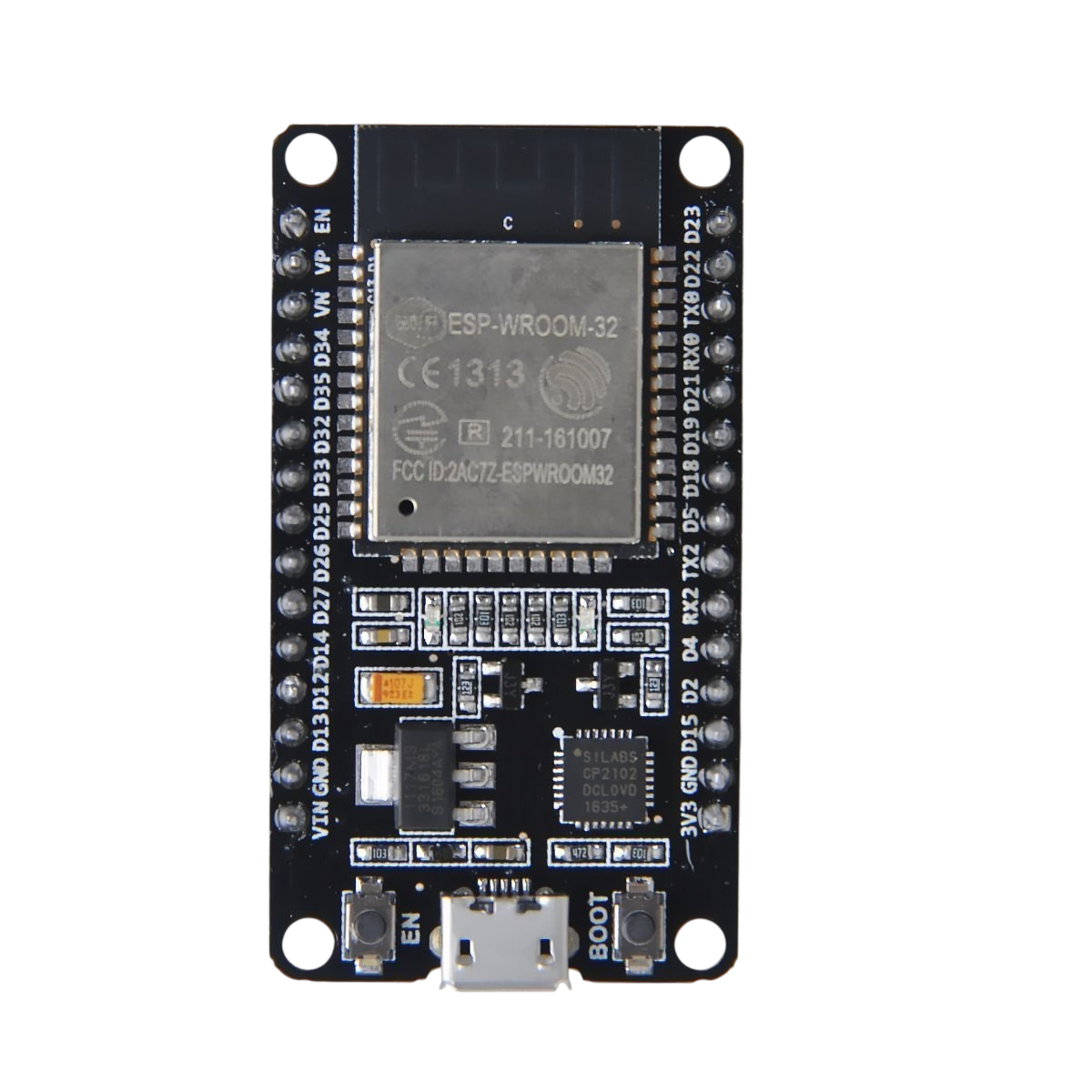
Robot Components
Click on a component's name to see what it looks like before starting the wiring.
Wiring Diagram
Follow this table to exactly replicate the robot's connections. Make sure to connect all grounds (GND) together to avoid erratic behavior.
| Origin Component | Pin | Destination | Function |
|---|---|---|---|
| ESP32 WROOM-32 | 13, 14, 12 | Driver L298N | Right Wheel (enA, in1, in2) |
| 25, 27, 26 | Driver L298N | Left Wheel (enB, in3, in4) | |
| 2, 4 | Servos SG90 | Arm & Gripper Signal | |
| 18, 19, 21, 22, 23 | Array IR (5 Ch) | Black/White Line Reading | |
| 5 (Trig), 17 (Echo) | HC-SR04 | Obstacle Detection (15cm) | |
| PDB XT60 (LiPo 3S) | 12V | L298N (VCC) | DC Motors Power Supply |
| 5V | ESP32 (VIN/5V) | Logic Power Supply | |
| Batterie Li-Ion 2S | LM2596 (5V) | Servos SG90 (VCC) | Dedicated Servo Power (Prevents reboots) |
| ⚠️ IMPORTANT: Connect all GNDs (ESP32, L298N, Sensors, LM2596, PDB) together. | |||
Complete Source Code (ESP32)
Copy this code and upload it via the Arduino IDE. Don't forget to install the ESP32Servo and HTTPClient libraries.
Important: Before uploading, you absolutely must modify the variables ssid, password, serverIP, and teamToken at the top of the code with your own network information!
Specifications
Core Electronics
- • Brain: ESP32 WROOM-32
- • Motor Driver: L298N
Motors (L298N)
- • Right Wheel: 13 (enA), 14 (in1), 12 (in2)
- • Left Wheel: 25 (enB), 27 (in3), 26 (in4)
- • Arm/Gripper: 2x SG90 (Pins 2 & 4)
Sensors
- • Infrared Array (5 Ch): 18, 19, 21, 22, 23
- • Ultrasonic HC-SR04: Trig 5, Echo 17 (Calibrated at 15cm)
Power Supply
- • Main Battery: 3S LiPo + XT60 PDB (12V & 5V)
- • Servo Battery: 2S Li-Ion
- • Regulator: Buck Converter LM2596 (5V)
Network
- • Server: 34.175.59.17
- • TCP Port: 5000
Want to build this robot? 🚀
We have prepared a Complete Pack containing everything you need to assemble this robot from A to Z. Don't waste time looking for parts one by one!
📦 The pack contains:
- ✅ Chassis & 3D Gripper
- ✅ ESP32 WROOM-32 & L298N Driver
- ✅ Sensors (Infrared & Ultrasonic)
- ✅ Servomotors & DC Motors
- ✅ Batteries (3S LiPo + 2S Li-Ion) & Power Supply
- ✅ Cables and all necessary components
Contact us directly to order your pack: